货物电梯PLC控制系统设计
随着电商产业的发展,人们越来越喜欢网购,快递员的任务日益繁重。目前快递的运输主要依靠人工进行,当工作量剧增的时候,快递员有时候就会出现力不从心的现象,客户也可能因为时间等客观原因不能及时地拿到快递。为了减少人力物力的消耗,尽量将快递员从繁重的任务中解救出来,本文设计了货物电梯PLC控制系统。
1 货物电梯的结构及工作原理
1.1 货物电梯的结构
货物电梯的基本机械结构由拖动装置、导向装置、载运平台、货叉助力装置和重量平衡装置组成,如图1所示。

1.拖动装置;2.导向装置;3.载运平台;4.货叉助力装置;5.重量平衡装置
图1 货物电梯的基本结构
1)拖动装置:拖动装置的功能是输出动力和传递动力,达到驱动货物电梯的上升或下降,主要由蜗轮蜗杆直流电机、钢丝绳和导向轮等组成。在载运平台上安装一动滑轮,一端经钢丝绳与蜗轮蜗杆轴相连,另一端与平衡块相连。在蜗轮蜗杆的带动下,钢丝绳上拉或下降。
2)导向装置:导向装置的主要功能是限制载运平台和平衡块的自由度,使载运平台和平衡块只能沿着各自的导轨作升降运动,而不发生摆动和振动。
3)载运平台:三节阻尼静音不锈钢轨道安装在载运平台的底部,将货物放在导轨上,当电动推杆推出信号时,货物被推出。利用三节阻尼静音不锈钢轨道,避免了货物与平台底面的接触,推送时避免了摩擦力,同时减少了噪音,起到助力作用。
4)货叉助力装置:步进电机滚珠丝杆滑台安装在载运平台底板上,货叉安装在滑台上。当步进驱动器发出脉冲时,步进电机得到脉冲开始转动,滑台(即货叉)伸出,叉起物品。
5)重量平衡装置:重量平衡装置主要作用是维持货物电梯运行的稳定性和安全性。
1.2 货物电梯的工作原理
当货物为大型件时,采用货叉助力装置。首先,按下货叉伸出按钮,PLC发出信号,使步进驱动器发出脉冲,步进电机得到信号并开始运转,此时货叉伸出,叉起物品;接着,按下楼层号按钮,PLC发出信号,经电磁继电器作用,直流电机正转,上升到指定楼层时触碰行程开关,电机停止运动,经PLC发出信号,步进电机驱动器得到信号发出脉冲,使步进电机反转,此时货叉收回,货物放置在该楼层;然后,步进电机停止运转,PLC发出信号,经电磁继电器作用,直流电机反转,货叉下降,到达一楼时触碰行程开关,电机停止运转,即可运送下一批货物。
当货物为中、小型件时,宜采用载运平台方式。首先,将货物放入载运平台,按下楼层号,经电磁继电器作用,直流电机正转,载运平台上升,到达相应楼层,触碰行程开关,电机停止运转,PLC发出信号,电动推杆得到信号开始工作,将货物退出载运平台;接着,电动推杆停止运动,PLC又发出信号,经电磁继电器作用,电动推杆收回,当收回到极限位置时停止;然后,PLC发出信号,经电磁继电器作用,直流电机反转,载运平台下降并回到一楼,压下一层行程开关,拖动电机停止转动,工作完成。
2 控制系统设计
因为PLC具有可靠性高、寿命长、易于维护、接线少、编程简单等优点,所以货物电梯采用PLC控制。
2.1 控制系统组成
货物电梯控制系统主要由PLC、步进电机、直流电机、电磁继电器、行程开关等组成。
2.2 PLC型号选择
本系统为四层楼的货物电梯,采用按钮对其进行控制,通过对I/O点数的计算和内存容量的估算来选择合适的PLC机型。采用PLC对货物电梯进行控制,装置的上升和下降,由一台电动机拖动,电动机正转为货物电梯的上升,反转为货物电梯的下降。载运平台的推出机构由步进电机推动,步进电机正转为推出货物按钮K5,反转为收缩推杆按钮K6。本装置总共有四层,装置外设有二至四层呼叫按钮K1~K3,一到四层都设有行程开关ST1~ST4,以达到限位的目的。载运平台的上升和下降,由拖动电机的接触器KM1和KM2进行控制,装置推出机构的推出和收缩由KM3和KM4控制。
因此,输入点共有11个,输出点共有4个,总共15个。
程序所占用的内存容量跟很多因素有关,因此,在程序设计之前只能对用户的存储容量进行大致估算,而不能得出具体的数值。
根据上述所得I/O点数以及估算的内存容量,故选择台达DVP-32ES。因为台达DVP-32ES的输入/输出点数为16/8,足以满足货物电梯的控制要求。
2.3 I/0地址分配
货物电梯控制系统具体的I/O分配如表1所示。
2.4 PLC外部接线图
货物电梯的PLC外部接线图如图2所示,装置采用24V的直流电源,通过核算,可知此型号的PLC容量完全满足所需的控制要求。
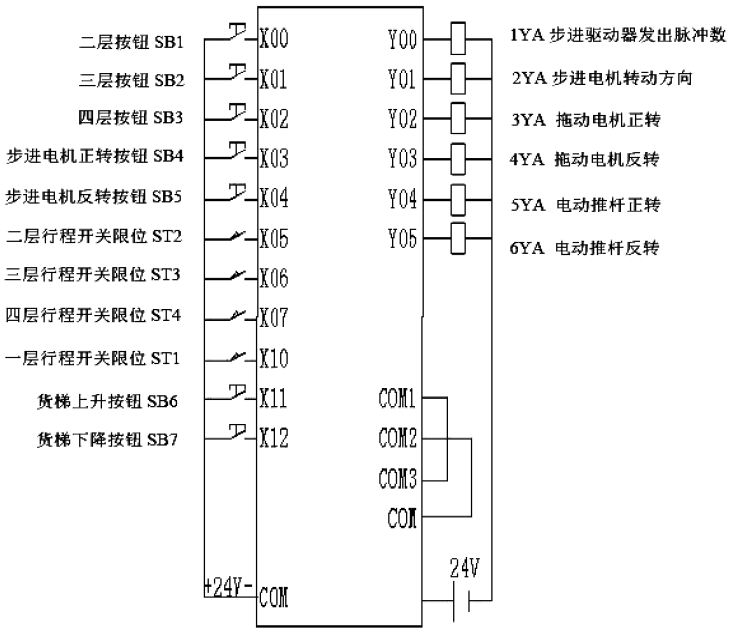
图2 PLC外部接线图
2.5 程序流程图
货物电梯的程序流程图如图3所示。
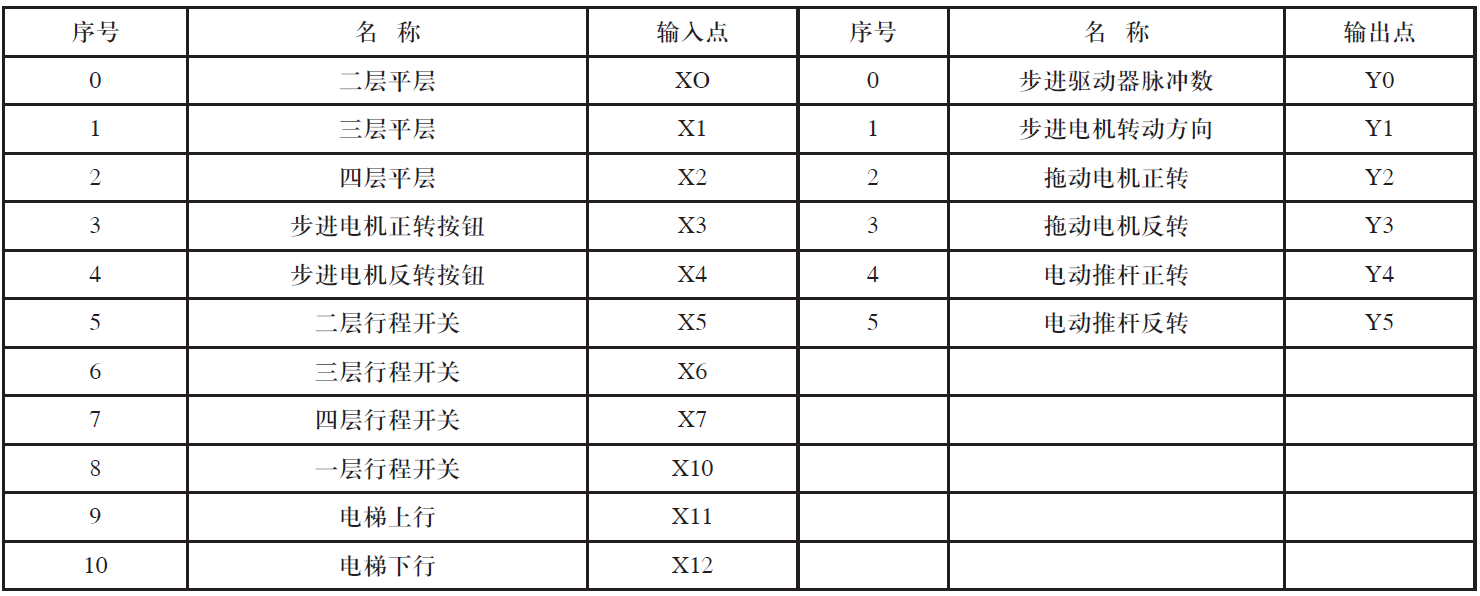
表1 I/O分配表
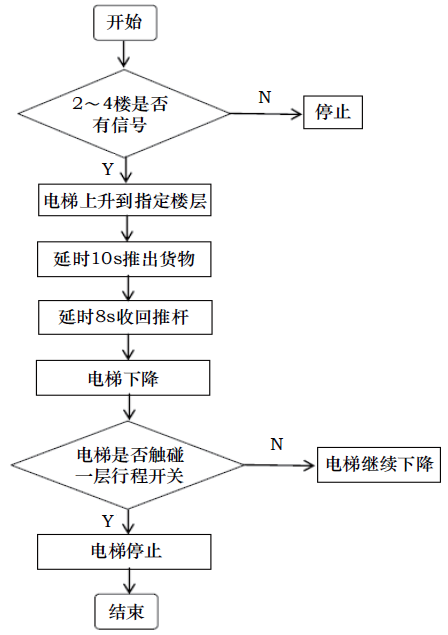
图3 货物电梯程序流程图
3 结论
本文介绍了货物电梯的基本结构及其工作原理,经过计算确定了PLC的型号,并对PLC控制器的I/O点数进行了分配,最后设计了PLC外部接线图和程序流程图。本文研制的货物电梯不仅价格低,而且安全性高,可以大大减轻快递员的劳动强度。


