电动汽车智能充电的设计
近年来,随着传统能源的日益枯竭,我国的经济发展正面临着很大困境,提倡新能源的开发与利用已经成为我国经济发展的唯一出路。这也使新能源的相关技术得到了迅猛发展,电动汽车便是以新能源技术作为核心而研发出的产物。不过,由于电动汽车的续航能力较差,这也使充电问题成为电动汽车发展过程中面临的一大难题。研发一种能够对电动汽车进行精准、高效、安全的智能充电系统,对于提高电动汽车续航能力、保障自然生态环境、缓解能源枯竭形势有着十分重要的意义。
1 电动汽车智能充电的研究
1.1 电动汽车智能充电装置
电动汽车在充电过程中,其核心在于充电装置,充电装置大置可分为两类,分别是车载充电装置与非车载充电装置,车载充电装置易于携带、结构简单,但该类充电装置只重视如何将电充进锂电池当中,而在电网影响、温度监控以及电池特性等方面则没有进行全面的考虑,这也使其在充电速度上较慢,并且极易给电网造成污染和危害。非车载充电装置则属于一种地面充电桩,这种充电装置的功率往往较大,在充电速度上也比较快,不过现阶段在许多城市中还尚未得到应用,并且该类充电装置的续航能力较差,在充电上也较为不便,这也使其仍旧需要很长一段时间的发展与完善。
1.2 电动汽车智能充电的要求
对于电动汽车来说,要想实现电动汽车的精准、快速充电,就必须要满足以下要求:
(1)充电系统的安全性必须要有保障,在充电过程中确保其不会对电网及周边人或物造成危害;
(2)智能充电系统应具备快速充电的特点,以此提高电动汽车的续航能力;
(3)智能充电系统应具备实时监测与保护功能,其能够对电动汽车中的电池电量、安全状态等数据进行实时的采集与监控,并避免在充电过程中因过流或过压等原因而造成充电系统损坏;
(4)智能充电系统应便于携带,以利于电动汽车能够随时随地的进行充电,提高电动汽车充电的便捷性。
2 电动汽车智能充电系统设计
为了使智能充电系统能够满足上述使用要求,本文设计了一种智能充电系统,该系统具备较高的安全性、快速性与便捷性,能够对电动汽车中的电池状态进行实时监测,从而实现精准、快速的充电,并且其还能在充电过程中防止过流或过压对系统造成破坏。
2.1 总体方案的设计
由220VAC/16A 的家用电网充当电动汽车智能充电系统的主电源,其输出功率为3.3kW,其对电动汽车电池BMS 单元的控制是通过CAN 接口来实现的,在充电过程中,当遇到瞬时电流过大状况时,系统会自动将瞬时电流限制成其自身能够承受的最大电流值,而当遇到过压或欠压状况时,系统则会停止充电,待电压恢复正常后会重新进行充电。该系统能够对交流线路中的电流进行实时监测,并对充电的电流进行限制,以预防瞬时电流超出其最大值16A。当电动汽车在运行过程中,严禁利用智能充电系统进行充电,只有在电动汽车完全停止后,系统才会允许驾驶员进行充电操作。
该系统的电源利用PFC 功率因数校正电路、滤波器及整流器来对交流电实施隔离转换,以此实现对电动汽车锂电池的快速充电,同时通过通讯电路和电池中的BMS 单元进行通讯。在充电过程中,系统会对其进行实时监控,并通过CAN 总线来下达充电、中断等控制命令。
2.2 智能充电模块设计
为了避免系统在充电时发出大量谐波而造成电网污染,因此需要对其总谐波量进行限制,通过UCC28070 来对PFC 功率因数校正电路进行设计可以有效解决这一问题。在恒流阶段中,系统会对充电电流进行限制,以此确保输入电压能够平稳过渡到恒压阶段。
2.3 电池数据采集模块
电动汽车智能充电系统能够对电池中的电流、电压及温度等状态信息进行实时采集与监测,在该系统中设置有JLD4U2P2 型电压传感器、JLK-7 型电流传感器、DS18B20 型温度传感器,通过这些传感器的利用来实现电池电压、电流及温度的数据测量与监测,其中,温度传感器可进行多个串联设置,以此确保其能够对电动汽车中的多个电池温度进行同时采集,其不仅成本较低,而且构造也较为简单,能够在不同的环境下实现系统的数据实时采集与监测功能。
2.4 电池管理控制设计
电动汽车智能充电系统中的电池管理控制单元主要是利用PIC18F66K80 单片机来实现其控制功能的,它能够对电池中BMS 单元的全部功能进行控制。为了节省系统的能量消耗,PIC18F66K80 单片机的工作模式采用了唤醒模式。在单片机中还扩展有12 位的A/D 转换模块,该转换模块自带有11 个转换通道。此外,单片机中还设置有相应的CAN 通讯接口、64KB 闪存存储器、1024 字节EEPROM以及能够进行寻址的两个USART 串行接口。该系统利用传感器来对电池中的电压、温度及电流等信息进行采集,并发送给PIC18F66K80单片机,经A/D 转换模块进行转换后,来对电池的SOC 状态进行估算,然后对这些数据进行处理。由于SOC 估算的时间较长会造成漂移问题,影响SOC 估算结果的准确性,因此需要对SOC 进行定期的检准。BMS 控制单元所下达的数据接收等命令是利用CAN 总线来实现的,在单片机中设置有CAN 控制器,并利用TJA1040 外部收发器与CAN 控制器中的收发模块电路来实现对数据通讯功能。
2.5 智能充电系统的具体流程分析
如图1 所示为智能充电系统的智能充电曲线示意图。
从图1 中可知该系统的输入电压在176V/AC 至264V/AC 之间,其输出电压则可达到250V/DC 至390V/DC, 输出功率为3.3kW,其最高电流输出为13A,由此表明该系统的运行稳定。电动汽车智能充电系统的具体流程是:当智能充电系统与交流电源连接时,系统会对自身状态进行自检,在自检通过后,系统会对交流电源进行匹配。这时系统中的硬件电路会输出单独的12V 直流电作为交流电源中的辅助电源,而系统软件则会进行逻辑分析,并对输出的辅助电源进行检测,只有在检测到辅助电源后,系统才会利用硬件连接来激活BMS 单元,待BMS 激活后,BMS 单元会将CAN 总线信号发送给系统,由系统对CAN 总线信号进行检测,以此确认BMS 单元是否被唤醒,在确认以后,系统会将准备信号发送给BMS 单元,此时的系统便处于准备状态。然后BMS 单元在收到准备信号后,会将使能信号传输到系统当中,这时系统便会从准备状态过渡到使能状态。当BMS 单元中的各类传感器对电池的温度、电流及电压等数据进行采集后,这时BMS 会根据电池的实际状态发送相应的充电命令,并将这些采集的数据一并发送给系统当中,系统在接收到充电命令及数据以后,其内部PLC 单片机便会控制继电器开启,同时将这些数据发送到显示屏中,驾驶员能够通过显示屏直观的了解到电动汽车中的电池充电情况,从而实现电动汽车的智能充电。
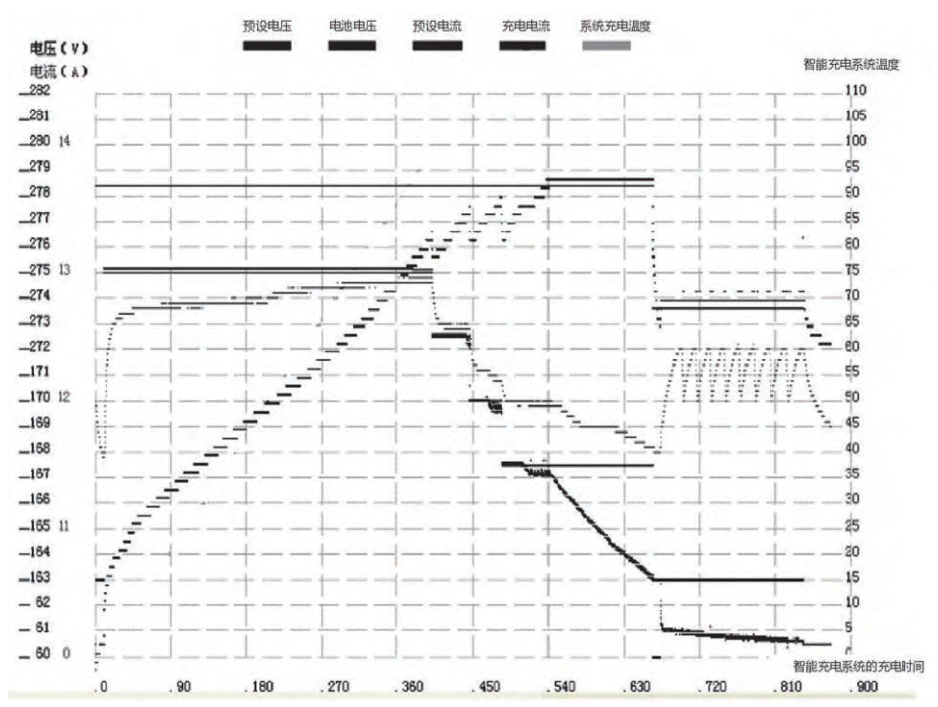
图1:智能充电系统的智能充电曲线示意图
3 结语
本文通过对电动汽车现有充电装置的类型、优缺点及其应用要求进行充分的分析,进而提出一种能够对电动汽车进行精准、快速、安全充电的智能充电系统,该系统的充电效率快、安全系数高,并且能够有效避免谐波对电网的污染,极大程度的提高了电动汽车的续航能力,有效解决了电动汽车充电难、耗能高、污染大等问题,这也使该系统具备了广阔的发展空间与极高的应用潜力。


