机械手控制教学实验台的改进
机械手是指能够自动抓取、多余度旋转的操作装置, 多用于自动生产线、自动机的上下料数控设备的自动换刀装置中。由于工业企业的广泛应用, 学校也纷纷引进机械手设备作为教学工具。用于教学使用和工业应用的机械手设备尽管在原理上相同或相似, 但在使用方面却存在很大差异, 主要是操作对象不同。工业应用的机械手设备面对的是熟练的工程技术人员或工人, 而教学设备面对的是初学者且大多数是学生。初学者编制联锁关系较复杂的控制程序难免存在错误, 导致设备经常损坏, 甚至危害人身安全。为此, 对实验室教学用机械手设备的控制系统进行了改进。
1、结构组成及原理
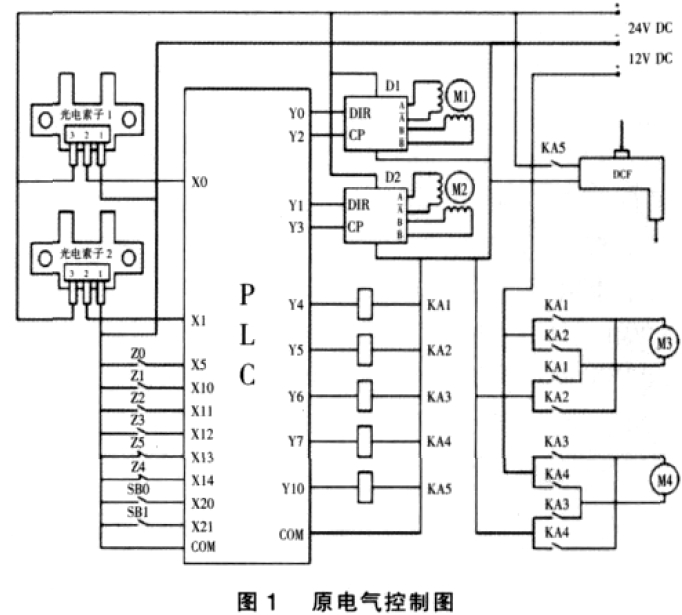
机械手一般由控制系统、驱动系统和执行系统组成。主要完成移动、转动、抓取等动作。控制系统是机械手的指挥系统, 它通过控制驱动系统, 让执行器按规定的要求进行工作, 并检测其正确与否。机械手设备有4 个旋转轴和一个夹爪, 4 个旋转轴是X 轴伸缩, Z 轴升降, 手臂和手腕回转。由步进电动机或通过旋转编码器可进行闭环控制的伺服电动机进行驱动,控制电路如图1 所示。
1.1 底盘及机械手爪正反运动
Z4、Z5 分别是底盘的左右两个极限位行程开关,Y4 和Y5 是正反转输出信号, 当底盘运动到极限位置时, Y4 或Y5 停止输出。Y6、Y7 分别是机械手爪正反转输出信号, 控制手爪驱动电机正反转。
1.2 竖轴运动
Z1 是竖轴向上极限位行程开关, Y0 和Y2 控制竖轴电源模块D1。其中Y0 是D1 的方向控制信号( DIR) , Y2是D1 的脉冲控制信号( CP) 。当Y0 为ON, Y2 有脉冲输出时, 电机M1 正转, 机械手向下运动; 当Y0 为OFF, Y2 有脉冲输出时, 电机M1 反转, 机械手向上运动; 当Y2 无脉冲输出时, 无论Y0 是ON 还是OFF, 电机M1 停转。
1.3 横轴运动
Z2 和Z3 分别是横轴的伸、缩极限位行程开关。Y1和Y3 控制竖轴电源模块D2。其中Y1 是D2 的方向控制信号( DIR) , Y3 是D2 的脉冲控制信号( CP) 。它的动作原理与竖轴相同。
根据图1 分析和长时间的教学使用, 该装置要求输入的PLC 程序必须完全正确, 否则会产生误动作损坏设备甚至伤害人身安全, 所以应完善控制系统, 增加限位元件。
2、改进方案及措施
方案1: 在机械手各运行轴或运行轨道两端, 加限位开关。
方案2: 在线路中增加中间继电器, 用原有的各极限位行程开关信号控制这些中间继电器, 中间继电器上的多对触点控制电路的联锁。
经过比较, 两种方案各有优缺点。方案1 直观明了, 易于改进, 但对原装置的改动较大, 与设备的初衷设计相差太远。方案2 没有改变初衷设计, 但难度较大。选择方案2 较为合适。具体措施如下。
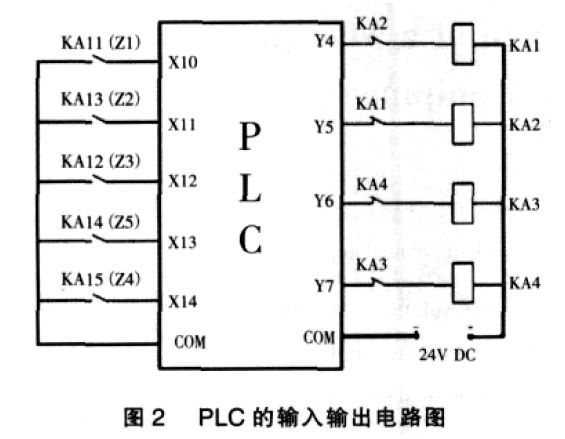
2.1 底盘正反转及机械手爪正反转控制电路的改进原图中Y4 与Y5 之间、Y6 与Y7 之间缺少硬件互锁。
如果程序出错或是误操作, 使中间继电器KA1 和KA2 或KA3 和KA4 同时得电, 会使电机M3 或M4 的电源发生短路。如果底盘没有停止正转或反转, 底盘上的限位小铁柱直接撞坏底座上的行程开关和用于定位的光电素子。为避免这种情况应增加硬件互锁触点, 如图2 所示。
2.2 底盘正反转限位保护的改进
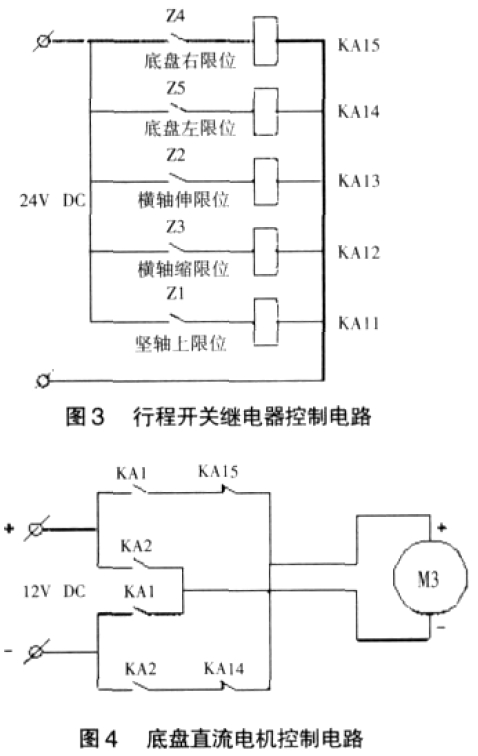
图3 为行程开关继电器控制电路, 其中用行程开关Z4 和Z5 分别控制中间继电器KA14 和KA15。利用KA14、KA15 上的多对触点, 提供PLC 的左、右限位输入信号和控制电机M3 的运行, 如图4 所示。假设Y4 的状态为ON 时, 中间继电器KA1 得电( 见图2) , 机械手底盘将向右运动。当底盘运动到右极限位时, Y4 没有变为OFF, 底盘继续向右运动。当限位小铁柱压到右极限位行程开关时中间继电器KA15 得电( 见图3) , KA15 的常闭触点断开, 电机M3 的正转控制回路断开( 见图4) , 电机停转, 底盘停止右转。反之亦然, 起到了保护设备的作用。
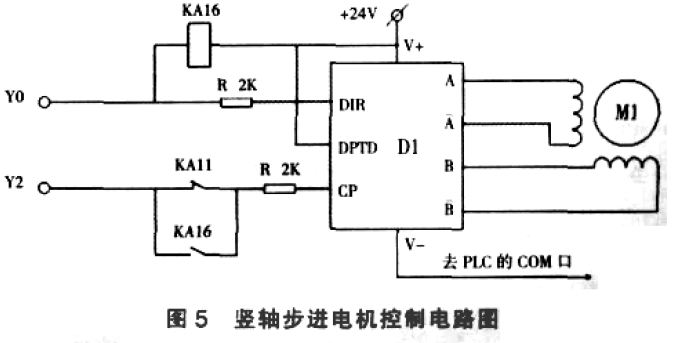
2.3 竖轴运动限位保护的改进
竖轴步进电机控制电路如图5 所示。假设Y0 为OFF, Y2 有脉冲输出, 电机反转, 机械手向上运动。当运动到上限位时, Y2 仍有输出, 机械手继续向上运动。机械手手臂压下竖轴上限位行程开关Z1, 中间继电器KA11 得电( 见图3) , Y2 支路断开, 电机M2 停转。此时机械手需要向下运动时, Y2 有脉冲输出, Y2 的支路在KA11 处已被断开, Y0 的状态为ON, KA16 线圈得电, 常开触点KA16 闭合, 电机M2 正转。
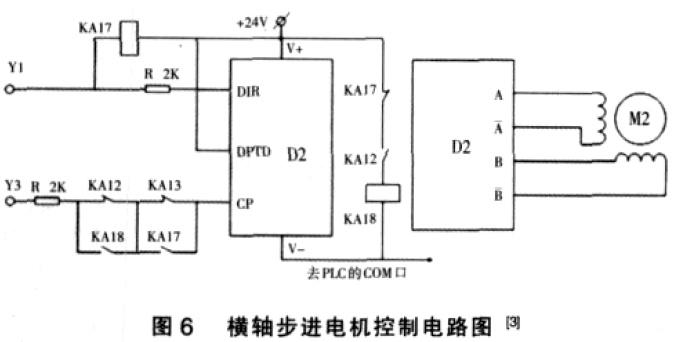
2.4 横轴运动极限位保护的改进横轴步进电机控制电路如图6 所示。横轴有伸、缩两个极限位, 假设Y1 的状态为OFF, Y3 有脉冲输出。电机反转, 横轴臂外伸, 碰极限位Z2 时, Y3 并不停止输出, 中间继电器KA13 线圈得电, KA13 常闭触点断开, Y3 的支路断开, 横轴臂停止运动。此时横轴臂需回缩, Y3 有脉冲输出但支路已断开, Y1 的状态为ON,KA17 线圈得电, 其触点闭合接通Y3 支路, 电机正转,横轴臂回缩, 回缩运动到极限位Z3 时, Y3 不一定停止输出, 中间继电器KA12 得电, 其常闭触点断开, Y3 的支路再次断开, 轴臂停止回缩运动。横轴臂需再次外伸时, Y3 的支路已断开, Y1 为OFF, KA17 线圈失电,碰极限位Z3, KA12 线圈得电, KA18 线圈得电, KA18触点闭合接通Y3 的支路, 电机反转, 横轴臂外伸。
3、改进效果
(1) 原设备的原理不变。
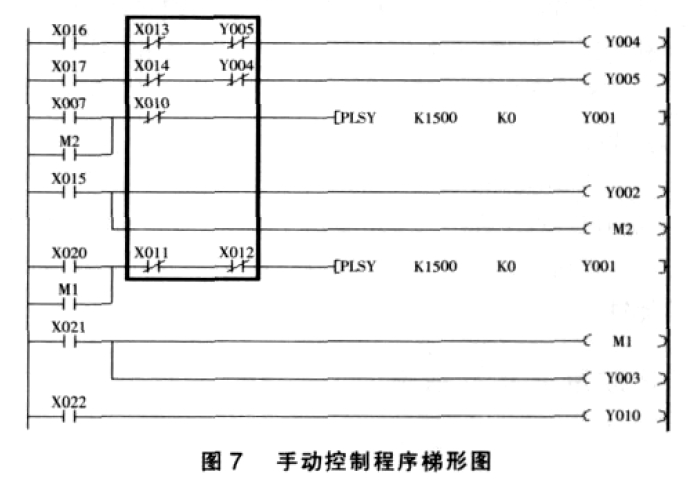
输入在原设备运行过的正确程序中的手动控制部分(程序见图7) , 运行后其动作过程与改进前是一致的,这证明改进后设备的原理不变。
(2) 能在误操作或运行错误程序的情况下保护设备。
去掉图7 中的黑线框是学生编制的错误程序, 运行时严重损坏过设备。控制电路经过改进后又输入该错误程序并运行, 其动作过程与运行图7 中的正确程序是相同的, 证明了电路改进是成功的。